I was thinking about designing a wireless joypad to control my robot, and I finally came up with an idea to repurpose a cheap Gigaware PS2 Joypad from RadioShack, which cost only $9.99. This joypad includes:
- 2 Joysticks
- 1 8-way D-Pad (Direction Pad)
- 8 Action Buttons
- 4 Extra Buttons (Select, Start, Macro, Mode)
I began by searching the web for ways to interface this PS2 controller with an Arduino and discovered an Arduino-compatible library called the PSX Library. Unfortunately, it didn’t work with my setup, likely because the library was designed for PlayStation 1 controllers, whereas mine was PS2-compatible. So, I decided to create my own library instead.
We developed the sperm into a clinging clot, then the clot into a lump, then the lump into bones, then clothed the bones with flesh, then We brought it into being as a new creation. So Blessed is Allah, the Best of Creators.
Quran 23:13-14

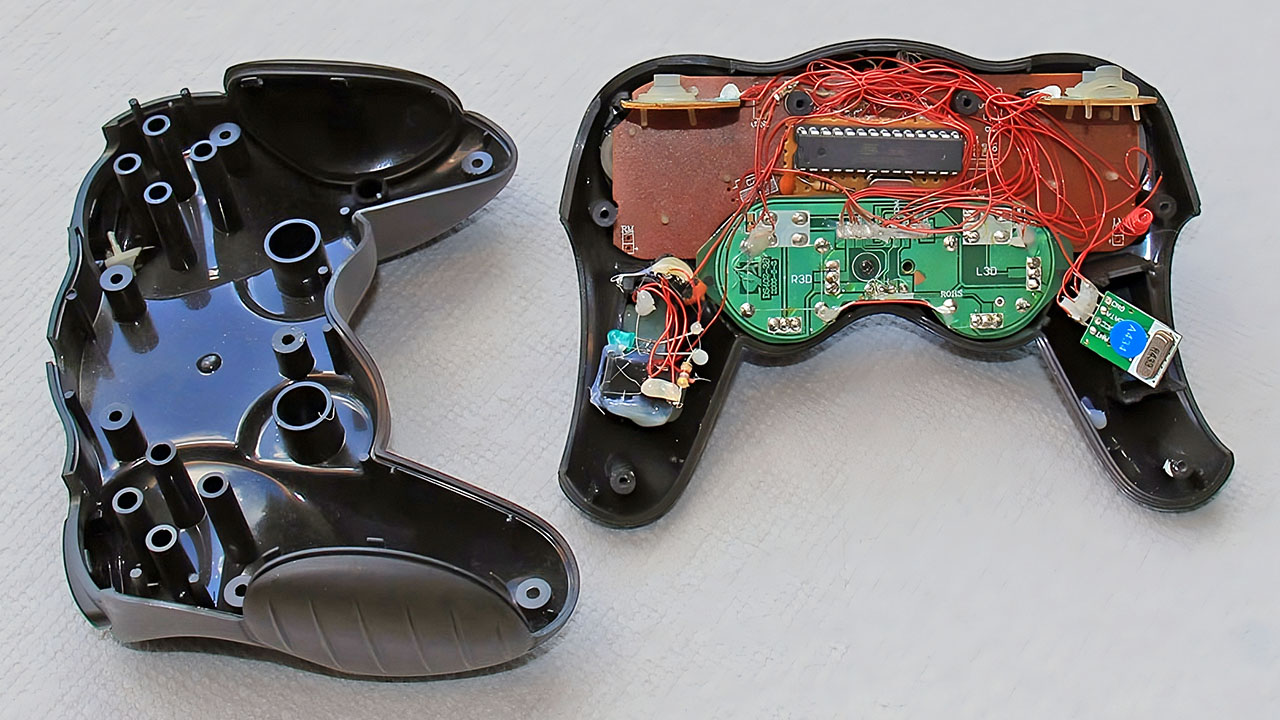
First, I removed the PS2 connector and the long cable, as this project would be wireless. I didn’t need any of the internal circuitry of the joypad, just the push buttons, LEDs, and joystick potentiometers. I figured out the schematic of the two joysticks:

The approximate value for each potentiometer is 5.2K ohms. These four points would serve as the Arduino’s analog inputs (Pins 1 to 4). Due to the limited space inside the joypad, I used wire wrap wires to solder the connectors for the buttons, potentiometers, and LEDs. I managed to solder only 8 out of the 16 buttons because the others were too compact to handle. These 8 buttons and 2 LEDs would connect to 10 digital I/O pins on the Arduino.
Here is the picture of the modified joypad:

And here are the Arduino, and the RF transmitter and receiver modules:

I found a few reference articles on interfacing RF modules with microcontrollers:
- Running TX433 and RX433 RF Modules with AVR Microcontrollers
- KLP/KLPA Module Walkthrough by Sparkfun
- Implementing RF Modules
I followed the first reference, and it worked without any issues. The example module used a 4-byte packet transmission protocol at 1200 bps, but I modified the code for the Arduino to work at 2400 bps since my RF modules were a bit faster, capable of 4800 bps.
Each joystick on my joypad has two axes (X and Y), giving 4 analog inputs to the microcontroller. Each input has a resolution of 1024 (0 to 1023), requiring 2 bytes (integer) for each. Therefore, 2 joysticks need 8 bytes (4 x 2 bytes). The 8 push buttons can be represented with 1 byte (1 bit per button). The data transmission packet also includes 1 synchronization byte, 1 address byte, and 1 checksum word (2 bytes), making the complete packet length 13 bytes (8 + 1 + 1 + 1 + 2).

I kept the code clean and well-commented. Since there are two separate circuits, the transmitter (joypad itself) and the receiver (Arduino Duemilanove), I wrote two separate scripts. However, I made the WirelessDataPacket class common for both.
Below is the source code for the transmitter module:
#include <stdio.h>
int r_sync = 0xAA; // synchro signal
int r_addr = 0x44; // receiver address
char buffer[36];
// pin configuration between arduino and joypad
int pinLeftStickX = 1; // Analog Pin 1
int pinLeftStickY = 2; // Analog Pin 2
int pinRightStickX = 3; // Analog Pin 3
int pinRightStickY = 4; // Analog Pin 4
int pinButtonL1 = 9; // L1 Button
int pinButtonL2 = 10; // L2 Button
int pinButtonR1 = 11; // R1 Button
int pinButtonR2 = 12; // R2 Button
int pinButtonSelect = 8; // select button
int pinButtonStart = 5; // start button
int pinButtonMacro = 7; // macro button
int pinButtonMode = 6; // mode button
int pinLEDRed = 2; // red LED pin
int pinLEDYellow = 4; // yellow LED pin
int releasedButtonMacro = true; // either the macro button is pressed(false) or released(true)
int releasedButtonMode = true; // either the mode button is pressed(false) or released(true)
// status
boolean macro = false;
boolean mode = false;
//-----------------------------
// multiple bytes manipulation
//-----------------------------
int getHiByte(int intData) {
return (intData >> 8);
}
int getLoByte(int intData) {
return (intData & 0xFF);
}
int mergeHiLo(int hi, int lo) {
return ( (hi << 8) | lo );
}
//----------------------------------
// Each data packet has 4 bytes:
// sync | address | data | checksum
//----------------------------------
class WirelessDataPacket {
public:
int address;
int leftStickX;
int leftStickY;
int rightStickX;
int rightStickY;
int button;
int checksum;
WirelessDataPacket(int addr) {
address = addr;
}
int sendPacket() {
checksum = address + leftStickX + leftStickY + rightStickX + rightStickY + button;
Serial.print(r_sync, BYTE); // send sync byte
Serial.print(address, BYTE); // send address byte
Serial.print(getLoByte(leftStickX), BYTE); // send leftStickX Low Byte
Serial.print(getHiByte(leftStickX), BYTE); // send leftStickX High Byte
Serial.print(getLoByte(leftStickY), BYTE); // send leftStickY Low Byte
Serial.print(getHiByte(leftStickY), BYTE); // send leftStickY High Byte
Serial.print(getLoByte(rightStickX), BYTE); // send rightStickX Low Byte
Serial.print(getHiByte(rightStickX), BYTE); // send rightStickX High Byte
Serial.print(getLoByte(rightStickY), BYTE); // send rightStickY Low Byte
Serial.print(getHiByte(rightStickY), BYTE); // send rightStickY High Byte
Serial.print(button, BYTE); // send button byte
Serial.print(getLoByte(checksum), BYTE); // send checksum byte
Serial.print(getHiByte(checksum), BYTE); // send checksum byte
return 0;
}
// wait until a new byte (8 bit) arrives, then return it
int receiveByte() {
while (Serial.available() == 0);
return Serial.read();
}
// wait until a new byte pair (16 bit) arrives, then return it
int receiveBytePair() {
int loByte, hiByte;
loByte = receiveByte();
hiByte = receiveByte();
return mergeHiLo(hiByte, loByte);
}
int receivePacket() {
int addr;
addr = receiveByte();
leftStickX = receiveBytePair();
leftStickY = receiveBytePair();
rightStickX = receiveBytePair();
rightStickY = receiveBytePair();
button = receiveByte();
checksum = receiveBytePair();
// checksum verification
if (checksum == (addr + leftStickX + leftStickY + rightStickX + rightStickY + button)) {
// if receiver address matches
if (addr == address) {
sprintf(buffer, "L(%04d, %04d) R(%04d, %04d) B(%04d)", leftStickX, leftStickY, rightStickX, rightStickY, button);
Serial.println(buffer);
delay(300);
Serial.flush();
}
}
}
};
WirelessDataPacket WDP(r_addr);
int getButtonValue() {
int value = 0;
if (digitalRead(pinButtonL1) == LOW) {
value = value | (1<<7);
}
if (digitalRead(pinButtonL2) == LOW) {
value = value | (1<<6);
}
if (digitalRead(pinButtonR1) == LOW) {
value = value | (1<<5);
}
if (digitalRead(pinButtonR2) == LOW) {
value = value | (1<<4);
}
if (digitalRead(pinButtonSelect) == LOW) {
value = value | (1<<3);
}
if (digitalRead(pinButtonStart) == LOW) {
value = value | (1<<2);
}
if (digitalRead(pinButtonMacro) == LOW) {
if (releasedButtonMacro) { // if previously released
macro = ~macro; // toggle the macro
digitalWrite(pinLEDRed, ~macro); // toggle the red LED
}
if (macro) {
value = value | (1<<1);
}
releasedButtonMacro = false;
} else {
releasedButtonMacro = true;
}
if (digitalRead(pinButtonMode) == LOW) {
if (releasedButtonMode) { // if previously released
mode = ~mode; // toggle the mode
digitalWrite(pinLEDYellow, ~mode); // toggle the yellow LED
}
if (mode) {
value = value | (1<<0);
}
releasedButtonMode = false;
} else {
releasedButtonMode = true;
}
return value;
}
void setup() {
pinMode(pinButtonL1, INPUT); digitalWrite(pinButtonL1, HIGH);
pinMode(pinButtonL2, INPUT); digitalWrite(pinButtonL2, HIGH);
pinMode(pinButtonR1, INPUT); digitalWrite(pinButtonR1, HIGH);
pinMode(pinButtonR2, INPUT); digitalWrite(pinButtonR2, HIGH);
pinMode(pinButtonSelect, INPUT); digitalWrite(pinButtonSelect, HIGH);
pinMode(pinButtonStart, INPUT); digitalWrite(pinButtonStart, HIGH);
pinMode(pinButtonMacro, INPUT); digitalWrite(pinButtonMacro, HIGH);
pinMode(pinButtonMode, INPUT); digitalWrite(pinButtonMode, HIGH);
pinMode(pinLEDRed, OUTPUT); digitalWrite(pinLEDRed, HIGH);
pinMode(pinLEDYellow, OUTPUT); digitalWrite(pinLEDYellow, HIGH);
Serial.begin(2400); // opens serial port, sets data rate to 9600 bps
}
void loop() {
WDP.leftStickX = analogRead(pinLeftStickX);
WDP.leftStickY = analogRead(pinLeftStickY);
WDP.rightStickX = analogRead(pinRightStickX);
WDP.rightStickY = analogRead(pinRightStickY);
WDP.button = getButtonValue();
WDP.sendPacket();
}And below is the source code for the receiver:
#include <stdio.h>
int r_sync = 0xAA; // synchro signal
int r_addr = 0x44; // receiver address
char buffer[36];
//-----------------------------
// multiple bytes manipulation
//-----------------------------
int getHiByte(int intData) {
return (intData >> 8);
}
int getLoByte(int intData) {
return (intData & 0xFF);
}
int mergeHiLo(int hi, int lo) {
return ( (hi << 8) | lo );
}
//----------------------------------
// Each data packet has 4 bytes:
// sync | address | data | checksum
//----------------------------------
class WirelessDataPacket {
public:
int address;
int leftStickX;
int leftStickY;
int rightStickX;
int rightStickY;
int button;
int checksum;
WirelessDataPacket(int addr) {
address = addr;
}
int sendPacket() {
checksum = address + leftStickX + leftStickY + rightStickX + rightStickY + button;
Serial.print(r_sync, BYTE); // send sync byte
Serial.print(address, BYTE); // send address byte
Serial.print(getLoByte(leftStickX), BYTE); // send leftStickX Low Byte
Serial.print(getHiByte(leftStickX), BYTE); // send leftStickX High Byte
Serial.print(getLoByte(leftStickY), BYTE); // send leftStickY Low Byte
Serial.print(getHiByte(leftStickY), BYTE); // send leftStickY High Byte
Serial.print(getLoByte(rightStickX), BYTE); // send rightStickX Low Byte
Serial.print(getHiByte(rightStickX), BYTE); // send rightStickX High Byte
Serial.print(getLoByte(rightStickY), BYTE); // send rightStickY Low Byte
Serial.print(getHiByte(rightStickY), BYTE); // send rightStickY High Byte
Serial.print(button, BYTE); // send button byte
Serial.print(getLoByte(checksum), BYTE); // send checksum byte
Serial.print(getHiByte(checksum), BYTE); // send checksum byte
return 0;
}
// wait until a new byte (8 bit) arrives, then return it
int receiveByte() {
while (Serial.available() == 0);
return Serial.read();
}
// wait until a new byte pair (16 bit) arrives, then return it
int receiveBytePair() {
int loByte, hiByte;
loByte = receiveByte();
hiByte = receiveByte();
return mergeHiLo(hiByte, loByte);
}
int receivePacket() {
int addr;
addr = receiveByte();
leftStickX = receiveBytePair();
leftStickY = receiveBytePair();
rightStickX = receiveBytePair();
rightStickY = receiveBytePair();
button = receiveByte();
checksum = receiveBytePair();
// checksum verification
if (checksum == (addr + leftStickX + leftStickY + rightStickX + rightStickY + button)) {
// if receiver address matches
if (addr == address) {
sprintf(buffer, "L(%04d, %04d) R(%04d, %04d) B(%04d)", leftStickX, leftStickY, rightStickX, rightStickY, button);
Serial.println(buffer);
delay(300);
Serial.flush();
}
}
}
};
WirelessDataPacket WDP(r_addr);
void setup() {
Serial.begin(2400); // opens serial port, sets data rate to 9600 bps
pinMode(13, OUTPUT);
}
void loop() {
WDP.receivePacket();
}Everything worked well using the 4-byte transmission protocol from the reference. However, when I switched to the 13-byte packet, the transmission slowed significantly, and more than 50% of the data was lost.
Here’s how I calculated the speed:
- 2400 bps = 300 bytes per second (2400 / 8)
- 300 Bps = 23 packets per second (300 / 13)
The Arduino uses a 16 MHz crystal, which can produce a 0.1% error (ref: AVR BAUD Rate Calculator). Considering hardware and software factors, a 5% error is acceptable. However, in my case, the error rate was so high that the transmission broke up and became too slow. I believe this can be improved by optimizing the baud rate of the RF modules and employing better programming techniques, which I have yet to explore.
